Biography
Benjin Zhu is a 3rd-year Ph.D. candidate at the Department of Electronic Engineering, The Chinese University of Hong Kong since 2021. He is affiliated to the Multimedia Lab (MMLab), where he is supervised by Prof. Hongsheng LI and Prof. Xiaogang WANG. He earned his Bachelor’s in Software Engineering from South China University of Technology in 2018. Prior to CUHK, he worked at world-leading AI startups Horizon Robotics and MEGVII, where he was fortunate to collaborate with Dr. Gang YU, Dr. Xiangyu ZHANG and Dr. Jian SUN on topics like Object Detection and Self-supervised Learning.
Benjin’s research interests primarily lie in 3D Scene Understanding. He won the first nuScenes 3D Object Detection Challenge at WAD, CVPR 2019 and proposed CBGS, which has been widely adopted in both industrial and community. He has contributed to many popular codebases including world’s first general 3D object detection framework Det3D, as well as very efficient research codebases like CVPods and EFG.
- 3D Scene Understanding
- Autonomous Driving
- LLMs
Ph.D. in Electronic Engineering, 2021 ~ Present
The Chinese Universityh of Hong Kong (CUHK)
B.Eng. in Software Engineering, 2014 ~ 2018
South China University of Technology (SCUT)
News
- 2024-07 The high-res nuCraft 3D Occupancy Dataset is accepted by ECCV 2024. ✨
- 2023-07 TrajectoryFormer is accepted by ICCV 2023.
- 2023-03 EFG, an Efficient, Flexible, and General deep learning framework is public avaiable!
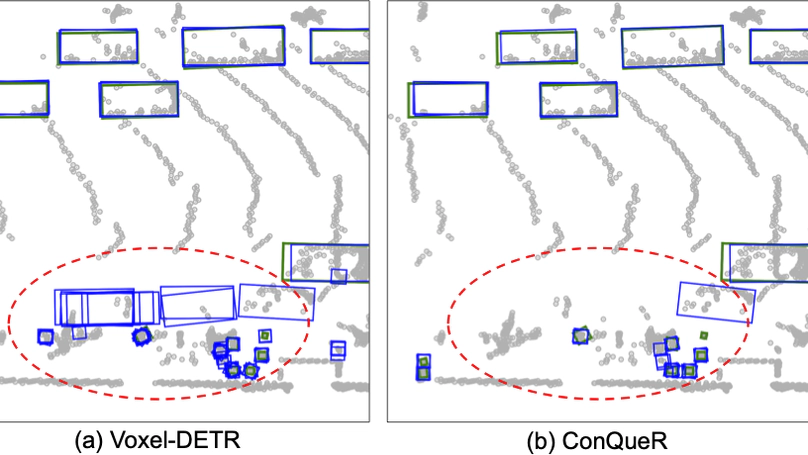
- 2022-12 ConQueR is accepted by CVPR 2023, and selected as a Highlight (Top 2.5%). ✨
- 2022-07 MPPNet ranks 1st on WOD 3D Object Detection, and is accepted by ECCV 2022.
Work Experience
Featured Publications
More Publications
Projects